Pallet Packing Information
Definitions
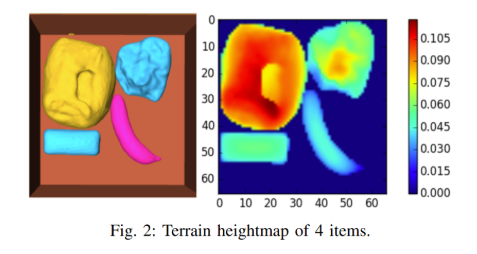
Height Map
2D grid of values that represents elevation.
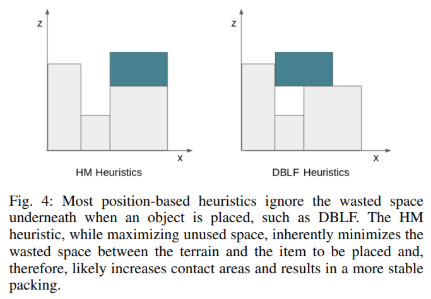
Heightmap Minimization Heuristic
Scores placements that minimize the heightmap. Intuitively, this means minimizing the volume of space used underneath the placed item. This generally results in more stable packing and reduced wasted space. (See figure below for illustration.)
Brute Force Search (3D Grid Search)
Given a specified resolution, objects are moved across all possible positions. Placements are only considered feasible if they do not overlap/collide with other objects or pallet size.
Empty Maximal Space
Largest empty orthogonal spaces whose sizes cannot extend more along the coordinate axes from its front-left-bottom corner.
Assumptions
- Object weight/density is ignored
- Specified packing order is followed (we pack boxes in that order)
User Specified Parameters
Pallet Dimensions
Custom dimensions for the pallet container.
Packing Algorithm (Random vs. Corner Height)
Choice between different packing strategies.
Rotation
- No Rotation: Only XY rotation (about the z-axis) is allowed.
- Full Rotation: Items can rotate in 90° increments.
For simplicity, all items are treated as boxes, since angled placements on pallets can lead to instability.
Algorithms
Random Algorithm
For this, we first do a brute force search and randomly sample from list of feasible candidates.
Corner Height Algorithm
- • Performs a brute force search to find feasible placements
- • For each placement, a score is given
- • Whether it is in a corner
- • Heightmap minimization
- • Choose the placement with the highest score